
Solutions & Support
Support for advanced manufacturing
Case Studies




Technical Papers
Among the resources and support for advanced manufacturing available, we’ve prepared technical papers for you – please select your download from the choices below.

Thermal variation, mechanical wear, payload shifts and tooling movement all introduce deviations between programmed and executed motion.
These deviations accumulate quietly — increasing scrap, causing unplanned downtime, and absorbing engineering resources – often resulting in large financial consequences.
This paper demonstrates how continuous measurement and in-process correction can save costs and generate six-figure annual savings per production cell.

Five causes of robot drift (and how to eliminate them)
Robot drift, where advanced manufacturers experience small inaccuracies in robot cell performance over time, can lead to quality issues, compliance failures, costly downtime and wasted materials. Production efficiency can be seriously impaired, and extremely costly.
In this article, we identify five causes, and how to avoid the unwelcome consequences of robot drift.
Why is in-process metrology not more widely accepted in UK advanced manufacturing?
This whitepaper summarises a round-table discussion between senior engineers working for leading UK aerospace and automotive organisations, as well as senior engineers from UK research centres.
It provides a comprehensive overview of the objectives, challenges and considerations of those working directly with robots and automation. It highlights the need for increased education of metrology and photogrammetry solutions across sectors, to propel the industry forward to better align with the aspirations of Industry 4.0.

Automation and the challenges facing car makers, is a flexible manufacturing system the answer?
Get insight into the evolving demands on car manufacturers, why (in theory) flexible manufacturing is the answer and the realities of why flexibility is a challenge for conventional automation.
With automation playing a key role in manufacturing, this paper explores the challenges faced by traditional automated manufacturing when met with modern-day dynamic requirements.

3 Steps to improving Robot Accuracy by measuring, teaching and monitoring process performance
This article also tackles a range of assumptions associated with robots: repeatability vs accuracy, the interplay between robot payload and stiffness, as well as flexibility vs in-process adaptability.

A Data-Driven Approach to Improving Robot Performance, Productivity & Efficiency
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet.
{kind=link}
{kind=link}
FAQs
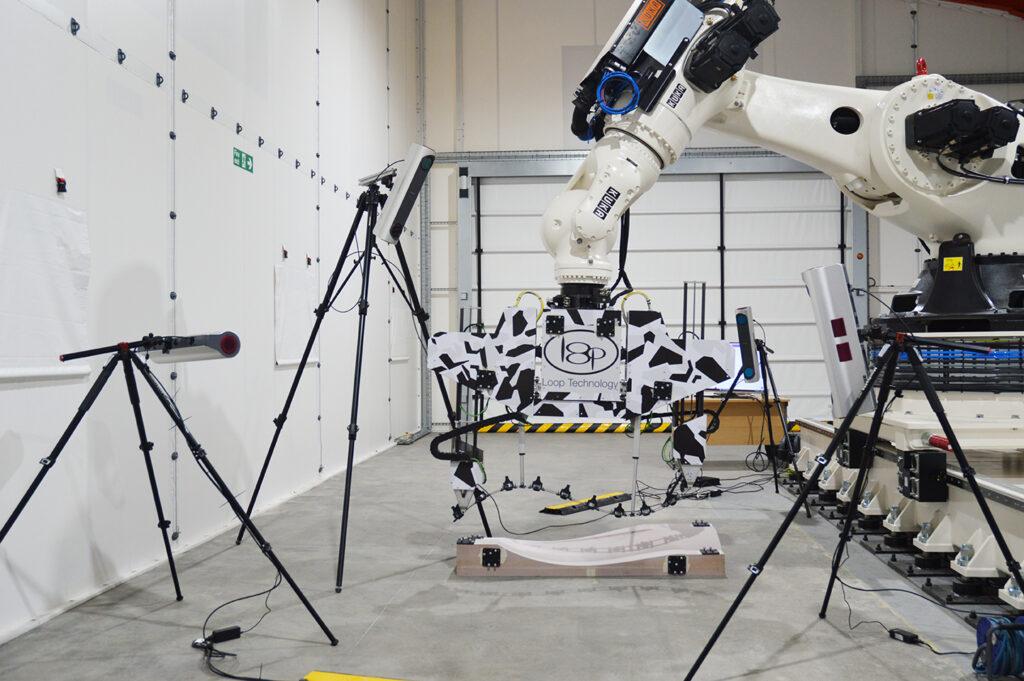
INSPHERE’s hardware, IONA, measures and captures data from multiple points of interest within a robot cell. This metrology grade positional data is so precise that it can be used to significantly improve the accuracy and reliability of repeatable automated precision processes.
IONA is a network of sensors designed to monitor and control industrial robots. The system can monitor the movement of the robot but also the relationship between the robot and the fixture or work object that it’s performing a task on.
Several nodes, or sensors, will be permanently deployed around the robot cell capturing data from multiple points of interest. The number of nodes will be specific to the cell set up. The metrology-grade data generated can be used to improve the accuracy and performance of robots enabling new processes to be automated.
Live positional data from IONA allows robot simulations and programs to be updated. It can be used to correct for variation in part location, cell setup or inherent errors in the automated system. The data enables an accurate digital twin of the manufacturing system, allowing the user to run offline programs without the need for manual intervention.
IONA is built on the principle of a network of sensors (nodes) permanently and discreetly deployed in a manufacturing environment. By observing motion from multiple vantage points, accuracy is increased and line-of-sight issues are removed. The expansible system scales to your needs and works at a cell to a factory level.
The System includes:
Nodes: Each node tracks the 6DOF motion of targets in 3D within its field of view. It is robustly designed and is connected via a single data and power POE cable. Nodes can be mounted on pre-existing guarding and are able to account for environmental instability.
Typically we recommend that 4-6 sensors are used, and will advise on the optimum number for each application.
Tile: Each tile is comprised of a pattern of retro-reflective spheres. These tiles are located sparsely around the cell to provide a reference frame. They are also used to track additional points of interest such as: parts, fixtures and tooling.
TCP Targeting: Discrete Targeting on the robot end-effector to permanently monitor the position and the relationship with the work object.
Controller: The controller manages the network of nodes, combining the 6DOF positions each node returns and calculates an accurate result using the proprietary IONA algorithms. Data output is simplified so no specialist knowledge or bespoke programming is needed to utilise the data.
IONA’s unique design means that its nodes/sensors can tolerate movement within the cell with no loss of accuracy i.e. it resects to always know the sensor position in relation to the tool point.
The nodes/sensors are simply mounted on automation cell guarding around the periphery of a robot cell. And they’re able to capture data from lots of different lines of sight meaning that you can continually monitor a process as that process is running.
The nodes themselves don’t need stable mounting. They can resect their own position in space so they can be mounted simply on the cell guarding itself. To connect the series of nodes it’s a simple Power over Ethernet cable – one cable provides the data interface and also the powering to the node. This makes installation and setup of the system very simple and can be done in a short space of time.
The sensors themselves measure small retro reflective spherical targets. These are passive targets and don’t need any cabling to connect them. These targets can be placed at strategic points on the robots or on the fixture that the robot is working on, or even to represent the cell datum structure. From the targets we’re able to construct 3D coordinate frames. Within our software we can track how these frames move and also the relationship between the various frames that are being monitored.
Typically IONA is accurate to around 0.2mm over a 1m3 area – this is more than 10x better than measurement accuracy achieved without robot guidance technology, and 5x better than other motion capture systems available.
The complete IONA system consists of both hardware and software.
The hardware element is the series of nodes, the controller, the targeting and everything that’s required to capture the data.
INSPHERE’s robot control software solution, ORA, is included in the IONA system. ORA is used to collect the data and perform analysis before feeding that data back into the system to control activity.
Yes. In many applications it is essential to know your position relative to defined cell datums, which is only possible through global monitoring.
IONA’s infra-red flashes are not affected by changes in visible light – an advantage over traditional vision systems.
The data from IONA can be used at three key stages of manufacturing.
- It can be used at the commissioning stage to correct for the differences that occur between the simulation or the offline programme and the physical setup of the cell. This data can also be used to feed back into the digital environment to update the digital twin, meaning that there is an exact replica in the digital world.
- The second stage is as a process enabler to increase the accuracy of an automated process.
- We can achieve a better alignment between the work object and the robot itself but we can also use our data to perform a calibration in situ on the robot. This calibration can be run as a one off when a cell is first set up, or it can be run each time a process operates.
- We can also use the data as part of a live feedback loop, so the process is continuously correcting and iterating based on the alignment or repositioning of elements within the cell. This can improve the dynamic accuracy of any given process.
- The third stage is as part of a process control approach. By continually monitoring a process over time we can start to spot the trends in the data, any deviations in tolerance, and use this to improve processes.
ORA robot control software provides you with an interface to control your robot – without the need for manual intervention. It is an out of the box solution bridging the gap between metrology hardware and automation systems.
ORA works with all major robot brands and can speak with a variety of sensing systems. And INSPHERE’s specialist software development team are continually expanding ORA’s compatibility so that even more manufacturers can benefit from the software. Contact us to check how it could work with your set up.
ORA has been designed to continually interpret measurement data to enable the application of remote, in-process control.
Automated alignment reduces Takt time significantly and provides greater overall production efficiencies.
We have an API (application programming interface) which allows the robot to request precise positional data from ORA, and ORA to act to eliminate robot errors.
Tool and base calibration, work object alignment, move-measure-correct, path verification, and frame measurement functions are all available to the end user.
This is where a pre-programmed ORA calibration routine calculates the tool centre point (TCP) relative to the robot flange, and the robot base position relative to work objects within the cell. This is an essential foundation to achieving accurate robotics.
Passionate about robotics and automation?
Stay up to date with the latest industry news, IONA product development, software upgrades, technical papers and much more